2.8. Wiring and Piping Drawings for Application
2.8. Wiring and Piping Drawings for Application
There are air unit and connector to connect the additional equipment to the robot manipulator.
Application connectors are indicated as follows.
[Note] Max air pressure: 5.0bar (5.1 kgf/cm2, 72.5 psi)
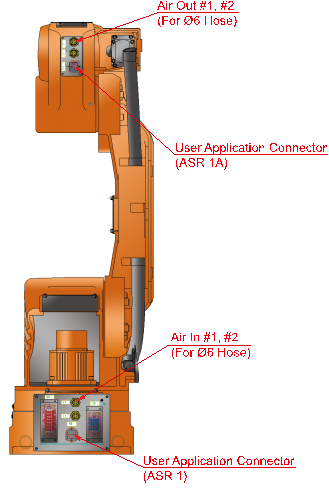
Figure 2.11 Wiring and piping drawings for application : [HA006]
| <ASR 1> · Cable : 0.75 sq * 6 c · Connector type : HAN 8 D (M) · Corresponding connector : HAN 8 D (F) | <ASR 1A> · Cable : 0.75 sq * 6 c · Connector type : HAN 8 D (F) · Corresponding connector : HAN 8 D (M) |

Figure 2.12 Application connector detail : [HA006]
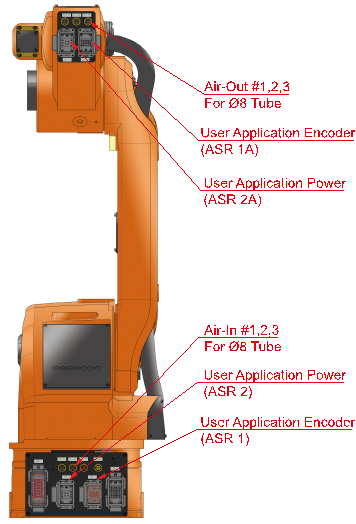
Figure 2.13 Wiring and piping drawing for application : [HA020W/HA010LW]
| <ASR 1> · Cable : 0.2 sq * 3p · Connector type : HAN 24 DD (M) · Corresponding connector : HAN 24 DD (F) | <ASR 1A> · Cable : 0.2 sq * 3p · Connector type : HAN 24 DD (F) · Corresponding connector : HAN 24 DD (M) |
| <ASR 2> · Cable : 0.75 sq * 6 c · Connector type : HAN 10EE (M) · Corresponding connector : HAN 10EE (F) | <ASR 2A> · Cable : 0.75 sq * 6 c · Connector type : HAN 10EE (F) · Corresponding connector : HAN 10EE (M) |


Figure 2.14 Connector detail for application : [HA020W/HA010LW]