7.3.9. Collision detection (TCP) setting
7.3.9. Collision detection (TCP) setting
Users can set the collision detection level while the TCP-based collision detection function is set as “Enable”. The option to the collision detection value and the collision detection function as Enable/Disable can be accessed by selecting『[F2]: System』→『3: Robot parameter』→『8: Collision detection (TCP) setting』(This menu will be displayed only when a robot supports the collision detection menu.)
When the collision detection function is set as “Enable”, detection will occur based on the default sensitivity set in the menu window if there is no “collision” command. In auto mode, detection will occur based on the sensitivity set in “sensitivity (auto mode)”, and in jog mode, detection will occur based on the sensitivity set in “sensitivity (jog mode)”. If there is a “collision” command, detection will occur based on the relevant sensitivity until the next “collision” command is received. As the sensitivity gets closer to 0, collision detection will occur with higher sensitivity.
l If the impact exceeds the set sensitivity, the motor will be turned off and generate the 『E0254 Collision detected (Relevant sensitivity O)』 message.
l When the motor is turned back on a few seconds after the motor is turned off, the robot will retract to the position prior to the collision. At this time, the retraction distance can be set in the collision detection (TCP) setting menu.
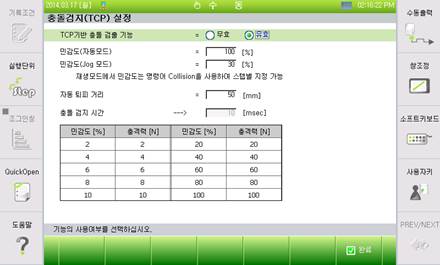
Figure 7.69 Collision detection (TCP) setting screen
In the collision detection (TCP) setting menu shown above,
l The TCP-based collision detection function can be activated through the TCP-based collision detection function Enable/Disable radio buttons.
l The sensitivity set in the menu is the default sensitivity that will be applied when there is no separate『Collision』 command in the step of the job program. It can be changed by the user.
l In “auto retract distance,” the robot’s automatic retraction distance after collision can be set.
l In “collision detection time,” the time until the robot stops after collision will be shown.
l When collision detection with higher sensitivity for each step is needed, it is possible to apply the desired sensitivity by using the collision command between steps as shown in the following figure.
l For example, in the following job program, collision will not be detected with the “0” sensitivity from Step 1 to Step 2, and will be detected with “100” sensitivity from Step 3 to Step 4, and with “2” sensitivity from Step 5 to Step 6, and with “30” sensitivity from Step 7 to Step 9.
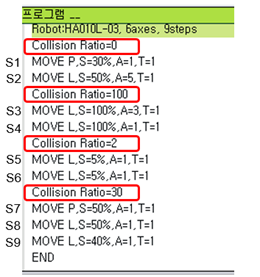
Figure 7.70 Use of the collision command for setting the sensitivity for each step