7.3.2. Axis origin
7.3.2. Axis origin
This allows the mechanical origin of each axis to be registered. For the axis origin setting, it is required to change to accurate values as it could impact the accuracy of the orthogonal operation of the robot.
Initially, standard values are set at the factory. It is possible to change the S axis origin according to the installed state of the robot and the adjacent jigs or change the R1 axis origin in line with the tool attachment direction by using this function.
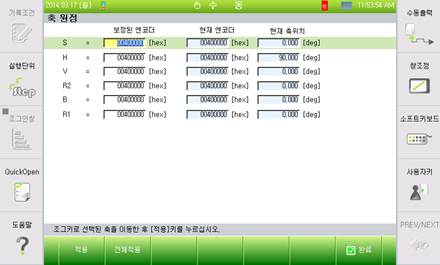
Figure 7.60 Axis origin setting screen

l The axis origin setting must be done after completing the 『Encoder offset』 setting. When the encoder offset setting is changed, the axis origin needs to be set again.
l For H, V, R2, and B axes, settings can be performed automatically by using the “Auto calibration” function.
l When you change the axis origin setting, the location in the existing program will change also. Thus, the axis origin setting must be done only during the initial installation stage.