10.5.6.5. UnloadAIn (Only available to LCD-handling non-traveling alignment robots)
10.5.6.5. UnloadAIn (Only available to LCD-handling non-traveling alignment robots)
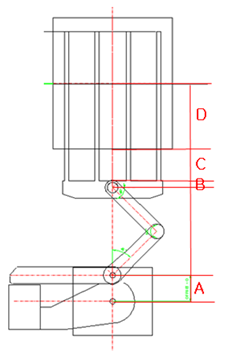
A: Distance from TH axis to the Arm
B: Distance from the hand center to the fork bracket tip
C: Distance from the fork bracket tip to the glass end
D: 1/2 of the glass size
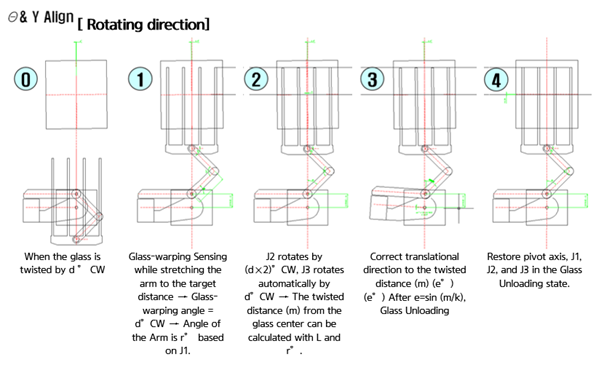
Explanation | It can only be used while the Unload With Alignment command is performed when calculating the correction amount of the TH axis, R(L) axis, and RA(LA) axis for LCD-handling non-traveling alignment robots. | ||
Syntax | UnladAln <InTheta, InY, RorL, Offset_Arm_TH, Offset_ForkBracket, Offset_Hand , Offset_HalfGlass , Theta_TH , Theta_RL, Theta_RALA> | ||
Parameter | InTheta | Glass displacement, which returns to Theta | Displacement (rad) |
InY | Glass displacement in the Y direction | Displacement (mm) | |
RorL | Select the upper and lower hand. | (0:R, 1: L) | |
Offset_Arm_TH | Distance from TH axis to the Arm | (mm) | |
Offset_ForkBracket | Distance from the hand center to the fork bracket tip | (mm) | |
Offset_Hand | Distance from the fork bracket tip to the glass end | (mm) | |
Offset_HalfGlass | Glass size | (mm) | |
Theta_TH | Correction amount to reflect on TH axis for alignment | (deg) | |
Theta_RL | Correction amount to reflect on R(L) axis for alignment | (deg) | |
Theta_RALA | Correction amount to reflect on RA(LA) axis for alignment | (deg) | |
Example | UnloadAln LV2!,V![326],V%[8],V![323],V![340],V![343],V![344],V![318],V![319],V![320] | ||