10.5.6.4. LoadAIn (Only available to LCD-handling non-traveling alignment robots)
10.5.6.4. LoadAIn (Only available to LCD-handling non-traveling alignment robots)
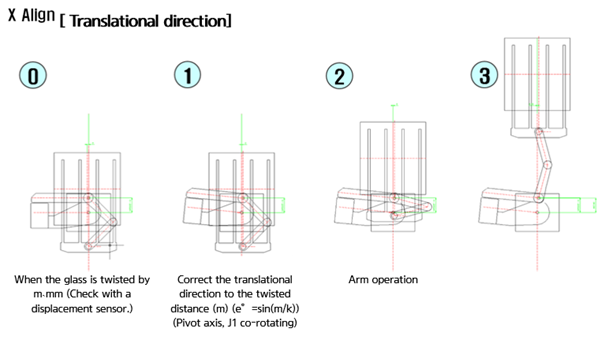
Explanation | X alignment amount received through Load With Alignment command can only be used when calculating the correction amount of the TH axis, R(L) axis, and RA(LA) axis for LCD-handling non-traveling alignment robots. | ||
Syntax | LoadAln <Delta_X, iRorL, Offset_Arm_TH, popValue, DeltaTheta_TH , DeltaTheta_RL, DeltaTheta_RALA > | ||
Parameter | Delta_X | Glass displacement in the X direction | (mm) |
iRorL | Select the upper and lower hand. | (mm) | |
Offset_Arm_TH | Distance from TH axis to the Arm | (mm) | |
popValue | Pose of step to departure (Load Wait) | Pose variable | |
DeltaTheta_TH | Correction amount to reflect on TH axis for alignment | (deg) | |
DeltaTheta_RL | Correction amount to reflect on R(L) axis for alignment | (deg) | |
DeltaTheta_RALA | Correction amount to reflect on RA(LA) axis for alignment | (deg) | |
Example | LoadAln V![327+V%[8],V%[8],V![323],P[2321],V![318],V![319],V![320] | ||