4.5.3. Connection/disconnection timing
4.5.3. Connection/disconnection timing
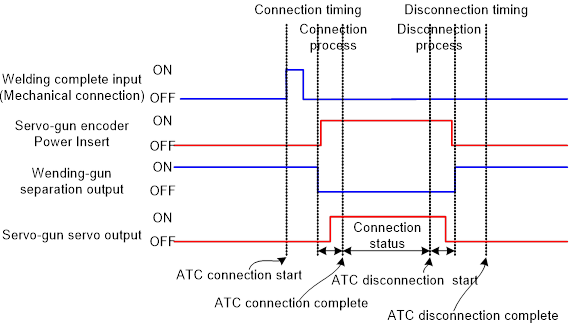
n Connection
While the connection command (GUNGHNG ON) is being executed, if the robot and the welding gun come into contact mechanically, the connection completion signal will be inputted and the connection will be processed internally by the controller. If the gun type is servo-gun, encoder power input and motor ON operation will be added for driving the servo-gun axis.
n Disconnection
Disconnection command (GUNCHNG OFF) executes the disconnection process in a sequence that runs counter to connection.