2.1. Setting of usage conditions
2.1. Setting of usage conditions
Sets the change environment for a servo tool.
『[F2]: System』 → 『4: Application parameter』 → 『11: Servo tool change』 → 『1: Use environment setting』
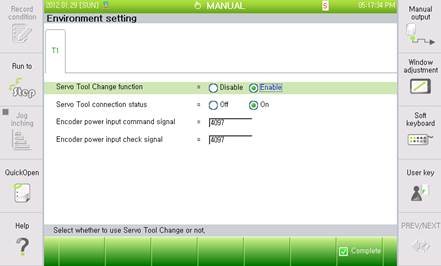
Figure 2.1Setting of Servo Tool Change Usage Conditions
(1) Servo tool change function
Set whether to use the change function for the additional axes.
(2) Servo tool connection status
Monitors whether the servo tool is connected or separated currently.
When the servo tool is connected currently, it is possible to separate it forcibly. In order to separate it, it is required to shift to <Off>, while the motor is off, and supply the power for the controller again. However, when the servo tool is separated, it is impossible to connect it forcibly.
(3) Input signal of encoder power input
Assign the output signal for the encoder power control during the connection or disconnection. When the signal is ON, the relay that controls the encoder’s 5V power cable will be activated.
(4) Output signal of encoder power input
Assign the input signal for checking the encoder power control status during the connection or disconnection. Check the status of the relay that controls the encoder’s 5V power cable.
Reference)
l The logic of the input and output signals can be set by going through『[F2]: System』 → 『2: Control Parameter』 → 『2: Input/Output signal setting』 → 『1: Input signal attribute』/『2: Output signal attribute』.
l The BD530 TBIO signals can be set in the number ranging 4097~4100.
l The TBIO signals of the robot program corresponds to SI[101~104]/SO[101~104] individually.