4.3. Mastering test function
4.3. Mastering test function
The position of robot should have validity for reliable robot monitoring. The mastering test function helps to evaluate the condition of robot and external axes. When the deviation of reference position and current position is too large, robot controller occurred error and robot would be stopped. The operator should maintain the robot and calibrate it.
There are two types of mastering test.
Table 4‑8 Mastering test types
Sensorless mastering test | Sensor based mastering test | |
Reference position | Position of sharp object or marked equipment | Position of conductive sensor |
Method | Manually performed by operator | Automatically performed by program |
Verify | Safety user | Sensor signal |
In mastering test menu, users have to select test type, test time and test position. These are common things to configure for SLMT and SBMT.
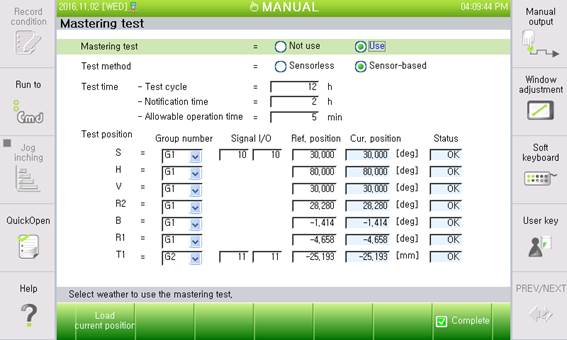
Figure 4.10 Mastering test menu
Table 4‑9 Mastering test parameters
Mastering test | Select to use the mastering test | |
Test type | Select one of types for test | |
Test time | Test cycle time [h] | Period of test cycle(12h ~720h) Default: 12h |
Pre-alarm time [h] | Notify hours before the test stars (1h~11h) Default: 1h | |
Max time limit [min] | Max time to move the robot since motor on when the robot stopped because of overtime (1min~60min) Default: 1min | |
Test position | Group | Groups number for mastering test (1~3) |
I/O signal | - input/output signal | |
Reference Pos. [deg], [mm] | - Reference position to verify the deviation - jog and press F1 key, read current position for reference | |
Current Pos. [deg],[mm] | Current position or each axis – ready only | |
Status | Express of deviation between Current position and reference position -OK: position of joint is in the range -NG: position of joint is out of range | |
If you want to save the configured parameters, the SafeSpace password should be needed. Setting or changing parameters and performing SLMT should be protected by password. The password is set by HRSafeSpace.
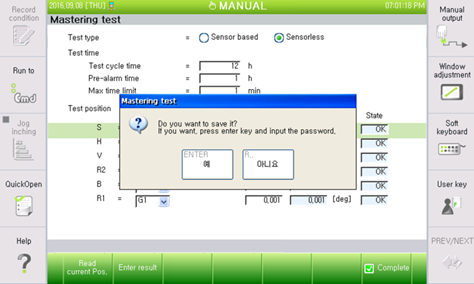
Figure 4.11 Enter the password for save parameters

Figure 4.12 Soft keyboard for input password
4.3.1. Sensorless mastering test