4.2. Program Teaching and Preparation for Cooperation Handling
4.2. Program Teaching and Preparation for Cooperation Handling
(1) You need the same number of operators as the number of cooperation control units. Therefore you need as many operators as the robots. However, with a TP sharer, one operator can make a concurrent control of all the robots.
(2) Check whether the common coordinate of the cooperation robot is set. Designate the manual cowork control mode switching function to a user-defined key.
(3) Move the master and slave robot to the starting position of the cooperation operation and record the starting position based on the reference position.

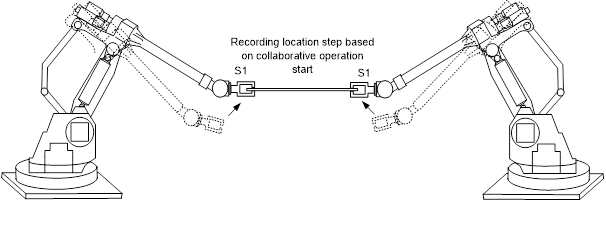
Figure 4.1 Recording position step based on cooperation operation start
(4) Set the mode of the master and the slave robots to the cowork mode with the user-defined function key. The robot roles can be set by entering the R351 code.
(5) Register the COWORK M/S command. COWORK command designates the master/slave recognition and designates the slave/master number. In this case, only one robot should be set as the master within a group, while up to three robots may be set as the slave robots.

(6) Control the master robot with jog. At this time the slave follow the master robot’s movement in relative position at the tools end position. During the cowork jog operation, the “Enable” switches of the slave robots should be on. The step is recorded only to the master from record position. It is not recorded in the slave robot controller.
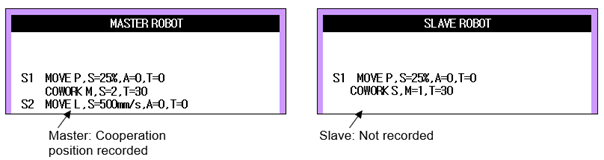
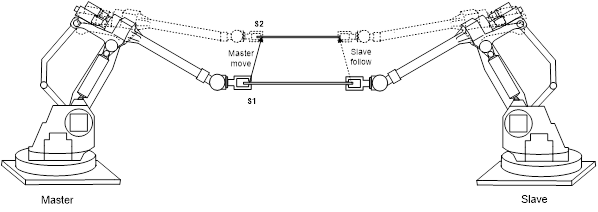
Figure 4.2 Master robot operation
(7) Cooperation operation step is recorded to the master. Set the interpolation type and speed of the master. Use the general move command within the cooperation operation function. (SMOV cannot be used.)
(8) When the cooperation operation is done, the COWORK END command is inserted to the master and slave.


l Do not set to Enable switch of the slave to OFF during manual cooperation operation. Because the hardware signal is processed prior to the communication speed, a misalignment between the robots can occur. In this case, it can damage the work object or robot hand in severe cases.