4.1.2. Method of using COWORK function
4.1.2. Method of using COWORK function
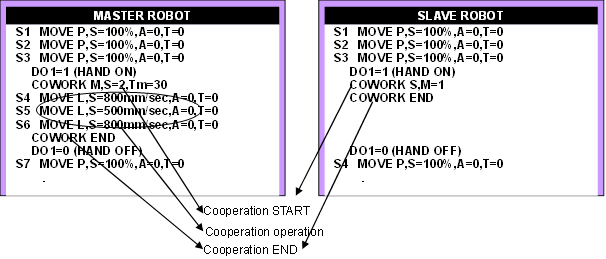
(1) For the master robot, the operating command in the zone between COWORK and COWORK END becomes the collaborative zone command. The slave cannot insert an operating command.
(2) For the slave robots, general move commands cannot be used in the cowork section, but the CMOV (cowork move) commands should be used.
(3) For handling operation, which is for the slave to follow the master robot, the slave moves with the master while keeping a relative position even though the CMOV command is not inserted, as shown in the below example.
(4) You can insert a CMOV command to the slave based on the master end effecter coordinate, and the recording position of CMOV is based on the master tool end effecter coordinate. If it is taught as shown in the following example, the cowork will be carried out in the “COWORK – COWORK END” section. In the cowork section, the slave robot will follow the movement of the master robot that is made along the CMOV route recorded in the master end-effector coordinate system.
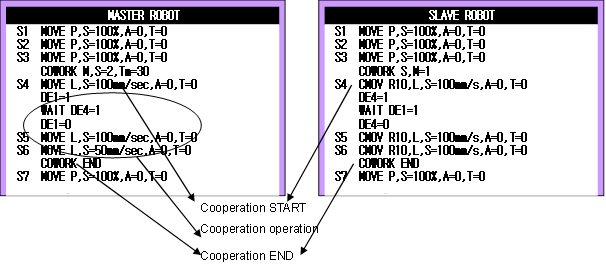

l At the end position of the cooperation operation, a COWORK END command must be inserted.
l For the slave robot, the MOVE command cannot be inserted within the cooperation zone. For the master robot, the CMOV command cannot be inserted.