4.4. Teaching for Arc Welding and Sealing (Jigless Cooperation Control)
4.4. Teaching for Arc Welding and Sealing (Jigless Cooperation Control)
(1) Set the manual cowork mode of the master and the slave robots to “individual,” record the steps for the cowork start position, and input the COWORK command for the cowork start position.

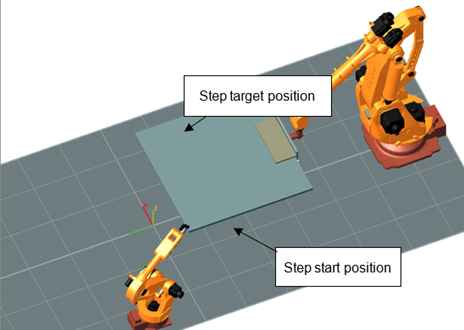
Figure 4.4 Step start and target position
(2) Set the manual cowork modes of the robots to master and slave depending on their roles.

(3) Operate the master with jog operation and the slave will follow. Record the master step in the desired recording position.

(4) The slave needs to be turned into the CMOV record mode by using the Shift+User keys or the R351,3 command. The robot role displayed at the top right of the screen turns from green to red.

(5) Jog operate the slave robot to the target position and press the ‘REC’ key.
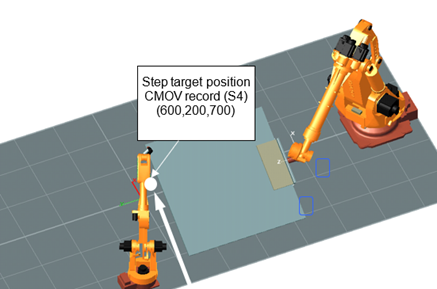
Figure 4.5 Step target position CMOV record
 |
(6) CMOV is recorded to the slave. The recording position of CMOV is based on the master tool end effecter coordinate. Press the QUICK OPEN to check and edit the recorded coordinate position.
(7) The coordinate recorded at this time is to be displayed as ‘Master end’.
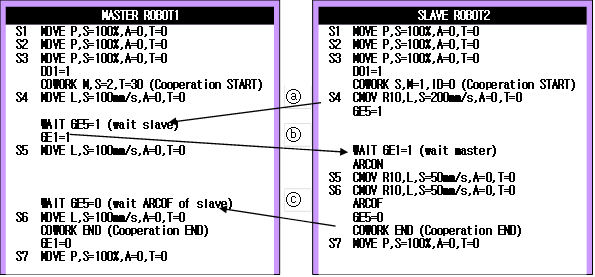
(8) For example, to synchronize the starting point of step 5 (S5) of master and slave, method of checking whether they arrived with GE or DE parameter is used.

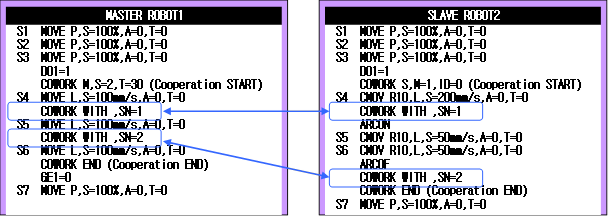
(9) But because the moving plan for recording step is executed individually between the master and slave, the time reaching the target position is different. To match the cowork start timing of the “MOVE” position of the master and the “CMOVE” position of the slaves in the cowork section, you may use the mutual interlock method using the HiNet I/O or the “COWORK WITH,SN=1” command. The “COWORK WITH” command will carry out a synchronization move only for the robots with a same SN number. If the command encounters the “COWORK WITH” command for a different SN number, an error will occur.
(10) For example, to synchronize the starting point of step 5 (S5) of master and slave, method of checking whether they arrived with GE, DE parameter is used.

※ If the above method is used, the master and slave robot checks each other whether they have arrived at step 4 (S4) and moves to step 5 (S5).
(11) When the cooperation operation is completed, the COWORK END command is inserted to both master and slave to complete the cooperation control teaching.


(12) The whole program explained earlier can control the timing such as ⓐ, ⓑ and ⓒ to control the timing of cooperation control, as follows.
(13) The COWORK WITH command is to be used to synchronize the positions between the master and slave while the cooperation control (Between COWORK~COWORK END) is in progress. If the COWORK WITH command is met in the middle of the cooperation control, it is required to wait until all the cooperating robots reach the COWORK WITH condition. Therefore, in the older versions of the program, the change can be also made by the following method:

l To use the weaving operation of CMOV, reference PREF setting must be recorded within cooperation control zone (COWORK~COWORK END).
l CMOV trace seam-tracking function using the laser vision sensor is not supported.
l COWORK WITH command must be used for same number for both master and slave in the cooperation control zone (COWORK~COWORK END).
l For the “COWORK WITH” command fulfilled by the cowork robots, a same SN number should be used.