4.3. CMOV command
4.3. CMOV command
CMOV {parameter1}, {parameter2}, {parameter3}, {parameter4}, {parameter5} | |
parameter1 | Manipulator identifier of master robot system Type: R(#1)(#2) #1 : Master robot system number (1~4) #2 : Master manipulator identifier of robot system (0: Robot, 1: Positioner Group 1, 2: Positioner Group 2) |
parameter2 | Types of interpolation Designs the slave robot’s interpolation method. Only applies to straight line or arc. (L: Linear, C: Circular) |
parameter3 | Interpolation speed Designates the relative speed compared to work object |
parameter4 | Accuracy (0~7) |
parameter5 | Tool number (0~31) |
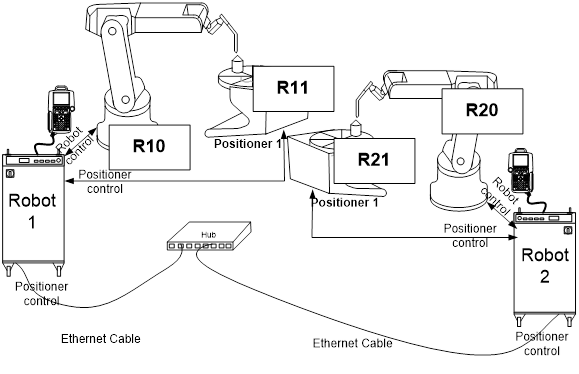
Figure 4.3 Method of distinguishing ID identifier