3.3.1. Setting master and slave robot
3.3.1. Setting master and slave robot
Set the robot roles of master and slave using the set User key (or R351). At this time, the role of the robot has nothing to do with the robot number.
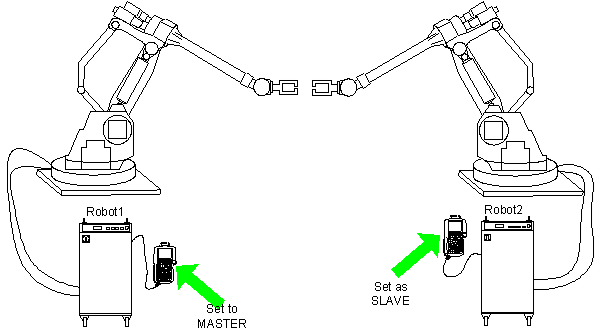
Figure3.7 Manual mode cooperation operation (Setting master robot and slave robot)
① Check if both master and slave robot are in ‘manual mode’.
② Keep both the master and slave robot in operation ready ON condition.
③ Use the Enable switch of the slave robot and maintain it to operation ready ON condition, and also check if the master robot is in operation ready ON condition.
④ When you control the master robot, the slave robot will follow in a relative position.
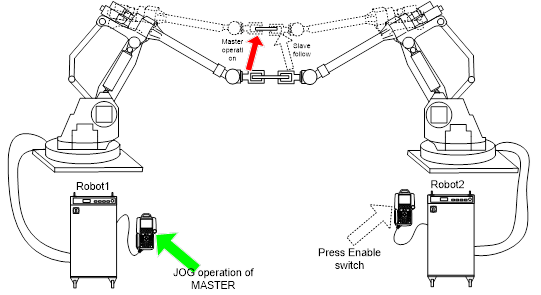
Figure3.8 Manual mode cooperation operation (Master robot operation / Slave robot follow)

l Manual collaborative job is not possible in the following cases.
When operating two or more master robots
When operating the slave robot
When the Enable switch for master or slave robot is not pressed
When the collaborative coordinate among robots is not set
Broken HiNet communication among the robots
l Jog operation is not possible for the slave robot during manual mode cooperation function. For a jog operation of the slave robots, switch the robot mode to the manual individual mode first.
l When the cooperation control is set to <Disable>, I:R#/S:R#/M:R# will not be displayed on the top part of the screen in manual mode and the setting will not be in effect. Therefore, manual cooperation jog is also not possible.