3.5. CMOV record mode jog
3.5. CMOV record mode jog
CMOV record mode is the mode to teach the slave position for jigless cooperation operation.
n Method for setting the CMOV recording mode
① Select the robot role as Slave
② Switch the manual cowork mode of the master robot to “master.”
③ When the operation is carried out in the orthogonal coordinate jog mode, the orthogonal coordinate jog will take place based on the tool End Effector coordinate of the mater. (Version V40.13-00 or older)
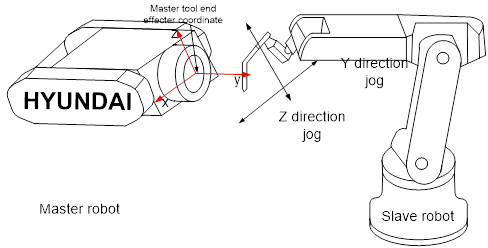
Figure 3.10 CMOV record mode jog
④ Even in the Cartesian coordinate system jog mode, the jog operation is made based on the Cartesian coordinate system of the robots regardless of the master coordinates. (Version V40.13-03 or later)

l The driving axes of the master and the slave robots that are subject to the cowork control should be parallel to each other as much as possible.
l When the slave is in CMOV record mode, jog operation for master robot in manual cooperation condition is not possible.
l Care should be taken because the jog coordinate system of the CMOV recording mode varies depending on versions.