8.4.2. Operation
8.4.2. Operation
As shown below, if two robots are performing welding for one positioner at the same time, the cooperation control arc function will be used. In this situation, if the two robots do not carry out welding simultaneously, defective welding could be caused.
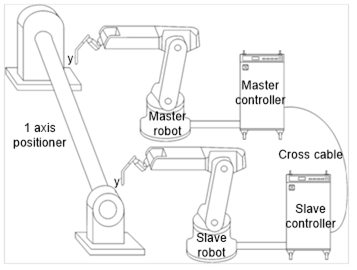
Figure 8.15 Conceptual diagram of cooperative controlled arc welding function
When the cooperation control is set, it is necessary to press the [QucikOpen] key in the “ARCON ASF#=??” command to enter the 『Welding start condition』 setting screen and then move to the next screen to bring up the additional menus as shown below. When the GB2/GZ4/GE2 welder is used, the cooperation control setting will be located on the third page of the 『Welding start condition』 setting screen.
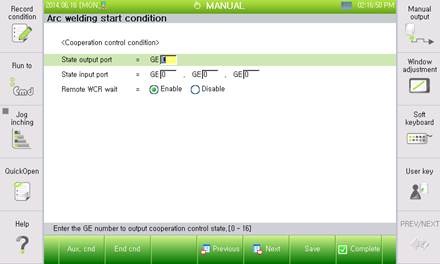
Figure 8.16 Arc welding start condition dialogue box when setting the cooperative control
Setting and operation per each item are as described below.
(1) In case the master robot number is 1 and the slave robot number is 2, the master side controller setting can be done as follows.
- State output port: GE4 (Select one among 1~4)
- State input port: GE8 (Match with slave size state output port)
(2) Slave side controller setting can be done as follows.
- State output port: GE8 (Select one among 5~8)
- State input port: GE4 (Match with master side state output port)
(3) Through the cooperative control, the two robots should be allowed to execute the ARCON command. Refer to the ‘Cooperative Control Function Manual’ for more details about the method.
(4) When two robots succeed the arc ignition simultaneously, two robots will move and execute arc welding simultaneously.
(5) If one robot fails the arc ignition, the other robot will stop arc and both robots will execute the retry function simultaneously. When two robots succeed the arc ignition simultaneously, two robots will move normally.
(6) If one of the two robots stops the arc welding due to stoppage or an error during the welding work, the other robot will also cease the arc welding work. When started again after the cause of the error is removed, the two robots will perform the overlap function together before enter the stage of performing the main welding work again.
(7) When only arc welding work on one side is finished normally during welding work by ARCOF, arc welding work on the other side will not be influenced by this.