8.3. Height sensing function
8.3. Height sensing function
This function can be used in tasks, such as TIG welding, in which the tool of a root is required to keep a certain distance from the workpiece. For TIG welding, because the height is proportionate to the arc length, the function is called AVC (Arc Voltage Control). The distance from the workpiece can be controlled by the sensors’ analog voltage input as well as the arc length correction parameter and welding current or voltage value that will be detected at the welder.
In order to use this function, the data input setting for the sensing function should be set as “Enable.” Refer to 1.2.2.1. Sensing function data input setting for more details about the data input setting.
After the input data setting for the sensing function is completed, it is possible to use the height sensing function by going through the procedure shown below.
(1) Command input
Use the HSensON command to start the height sensing. In later stages of the command, the condition number needs to be entered. There are 8 height sensing conditions in total.
Use the HSensOFF command to end the height sensing. The end command does not require any special arguments.
The following information shows an example of the work program in which the height sensing command is entered.
S1 MOVE L,S=100%,A=1,T=0
S2 MOVE L,S=20%,A=1,T=0
S3 MOVE L,S=100mm/s,A=1,T=0
HSensON AVC#=1 ß Height sensing start
ARCON ASF#=2 ß Arc welding start
S4 MOVE L,S=10mm/s,A=1,T=0
ARCOF ASF# ß Arc welding end
HSensOFF ß Height sensing end
S5 MOVE L,S=20%,A=1,T=0
END
(2) Height sensing function operating sequence
Height sensing will be performed when the ARCON command is executed after the height sensing command execution.
In general, at the initial welding stage, the current and voltage are not stable. Thus, the input data will be ignored until they are stabilized. When the input data are stabilized, the average will be calculated according to the reference data setting method. Height sensing will start immediately when the reference data are entered by the user.
The height sensing operating sequence is as shown below.
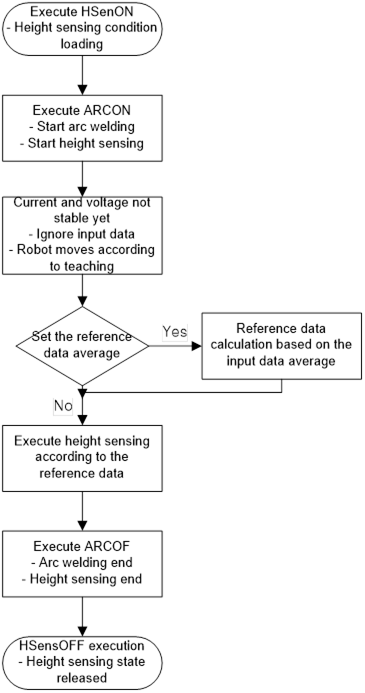
Figure8.12 Height sensing function operating sequence