2.1.3. Setting the Prevention of Arm Interference
2.1.3. Setting the Prevention of Arm Interference
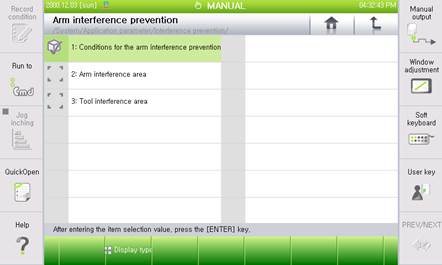
Select 『[F2]: System』 → 『4: Application parameter』 → 『7: Interference prevention』 → 『2: Arm interference prevention』. It is possible to enter through R888 — an R code.
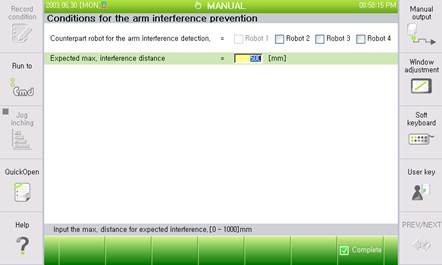
In order to set arm interference prevention as enable, select “Counterpart robot for the arm interference detection”. The interference expected maximum distance is the distance from the arm interference zone where deceleration and stopping occur when expecting interference.
Causes for Possible Errors | Errors may occur in the following cases: When the counterpart robot designated for interference detection by the corresponding robot has set the Cooperation control to 'Null', when the counterpart robot is not connected to HiNet network for Cooperation control, when not setting the counterpart robot's condition of arm interference prevention, and when not setting the counterpart robot's common coordinate system. |
Error Message | E0244 Robot 0) The other robots are not in Arm interference condition. |
Action | Check the status of cooperation between your robot and the counterpart robot, the setting of common coordinates, the participation in the HiNet network, and the conditions for interference prevention. (Refer to 2.1.1–2.1.3) |