2.1.2. Setting the Common Coordinate System
2.1.2. Setting the Common Coordinate System
It is necessary to set the common coordinate system for Cooperation control to detect inter-robot arm interference.
1) Before setting the common coordinate system, prepare a sharp tool and complete setting the auto integer.
(『[F2]: System』 → 『6: Auto calibration』 → 『1: Axis origin and tool length optimization』)
2) Teach the three points after finding the correct information about auto calibration.
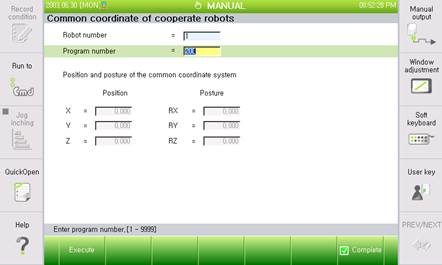
3) Set the common coordinate by using the program that is used for teaching the three points in 『[F2]: System』 → 『6: Auto calibration』 → 『5: Common coordinate of cooperate robots』
4) For further details, refer to the user's manual on Hi5a Cooperation control.
The common coordinate system needs to be set for both the corresponding and counterpart robots. When the corresponding robot's Cooperation control is null or the common coordinate system is not set, jog and playback will not occur.
Causes for Possible Errors | Errors may occur in the following cases: When the corresponding robot's Cooperation control status is null, or when setting the conditions for detecting arm interference without setting the common coordinate system. |
Error Message | E1342 Robot collaborative condition, common coordinate system invalid. |
Action | Robot coordination and common coordinate system must be set to use this function. |