9.2.2. Pose record MOVE sentence, Post substitute sentence
9.2.2. Pose record MOVE sentence, Post substitute sentence
This is a function that modifies the pose variable values of the MOVE sentence that includes the post variables, or the substitute sentence
(1) Monitoring for Pose parameter appears as following screen if pressing the [Quick Open] key in MOVE command (MOVE sentence) recorded as pose parameter.
(2) Move the cursor line to the item. Contents are reflected if pressing the [ENTER] key after entering numbers in the Input frame for inputting numbers.
(3) Please press the [SHIFT] + [<-] [->] key to control the radio button
(4) Post number (P)
It displays the current post number. If you enter another variable number and press [ENTER], it will move to the variable.
(5) Comments
It displays the comments that explain the current pose variable. Comments can be edited with the key pad or the soft keyboard. (Entered comments will be saved in the /Resident Flash /CataCmtP.txt file of Teach Pendant and it can be edited on PC
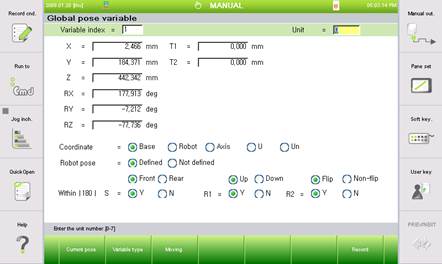
(6) Coordinates value of the current pose variable
It displays the factor values of the pose variable. Use cursor key to select the item that you wish to make changes. Enter the integer value and press [ENTER] to reflect the changes. However the changes will not be made if the Encoder has been selected as the type of coordinates system
(7) Types of coordinates system
It selects the types of coordinates system (among the Base coordinates system, Robot coordinates system, axis angle, User coordinates system, Encoder value) that will represent the location of pose variable.
(8) Robot’s structure component
It is displayed when the type of coordinates system is Base or Robot.
When Robot’s location is to be recorded, plural value may exist due to the characteristics of the equipment, so the Robot’s structure component must be configured in order to record the unique value for its location
(9) 『[F1]: Current robot pose / Original value』
If press once, the value of the Robot’s current pose will be displayed. If press once more, the hidden original value of the current step will be displayed (Toggle operation)
(10) 『[F3]: Moving』
While pressed, the Robot will move to the location of recorded pose variable (Jog)
(11) 『[F4]: previous』/『[F5]: next』
Move to the previous variable / Next variable.
(12) 『[F7]: Record』
Reflect to the pose variable. If press [ESC] to finish without records it, the contents that displayed on the screen will not be reflected.