2.1.6. Example of program preparation
2.1.6. Example of program preparation
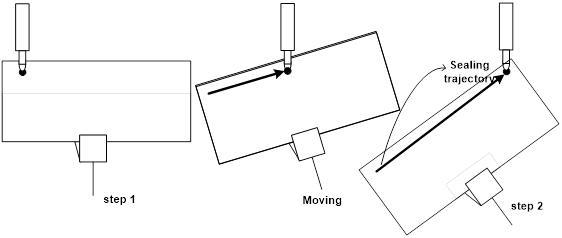
(1) Linear interpolation (MOVE SL)
While the robot is handling a workpiece, if a stationary sealing tool needs to be used for its outer area, the user needs to move the robot to perform teaching by matching the workpiece position to the sealing tool. For example, if sealing needs to be applied from S1 to S2 in a linear line as shown below, the user needs to record Step 1 as shown in Figure b), and, considering that movement to S2 needs to take place by applying the stationary tool interpolation, the teaching for S2 can be performed by moving the position and pose of the robot as shown in Figure c).

a) Required sealing trajectory


b) Step 1 teaching position c) Step 2 teaching position
According to the teaching program, the robot will move in a way to allow the stationary tool to move in a linear line on the workpiece.
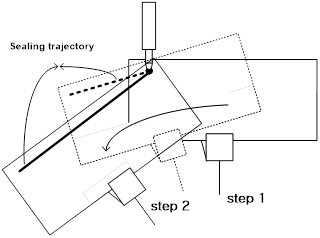
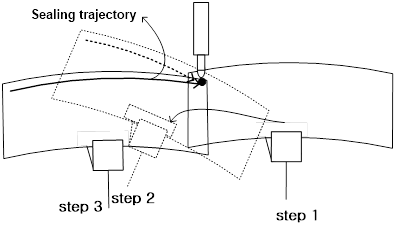
(2) Circular interpolation (MOVE SC)
The stationary tool interpolation function also supports circular interpolation. As shown below, the desired steps need to be recorded by applying circular interpolation

As shown above, after the teaching for Step 1 is performed, the teaching for Step 2 needs to be carried out by applying circular interpolation. Then, the teaching for Step 3 needs to be performed in a way to allow Step 3 to become a step that can be referred to suitably for the circular interpolation. When it comes to the steps for which the teaching is performed for the stationary tool circular interpolation, the robot will move to allow the stationary tool to move in a circular line on the workpiece.