2.1.1. Stationary tool coordinate system registration
2.1.1. Stationary tool coordinate system registration
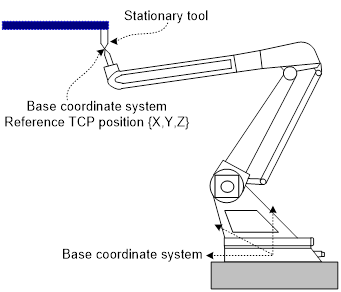
A stationary tool installation position needs to be registered as the reference position for the base coordinate system. In general, it is possible to locate the position of a stationary tool by matching the TCP between the stationary tool and a robot tool.
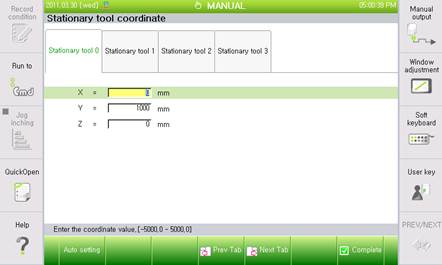
Select 『[F2]: System』→ 『2: Control parameter』 → 『7: Coordinate registration』→ 『2: Stationary tool coordinate』. Pressing the Auto Setting (F1) key will allow the current TCP value to be entered. For saving the set value, it is required to press the Complete (F7) key and exit the menu.