2.1.1. Servo-gun encoder offset
2.1.1. Servo-gun encoder offset
Generally, setting the encoder origin for the servo-gun will be executed in the state in which the moving tip is opened to the greatest extent possible. This is because the location can be matched uniformly when encoder data is changed due to the replacement of the servo-gun motor.
The encoder offset procedure of the servo-gun axis is as follows.
(1) Release the brake of the Servo-gun axis manually, and open the moving tip as widely as possible.

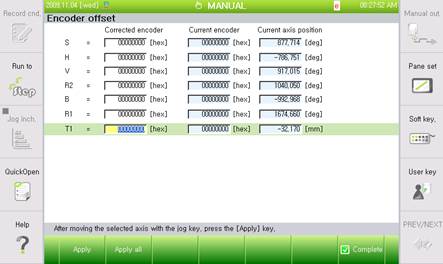
(2) Select a corresponding Servo-gun axis using 『[F2]: System』 → 『3: Robot parameter』 → 『4: Encoder offset』, and press 『[F1]: Apply』. Press 『[F7]: Complete』 when the value of the current encoder becomes “00400000”.