1.2. The principle of conveyor synchronization
1.2. The principle of conveyor synchronization
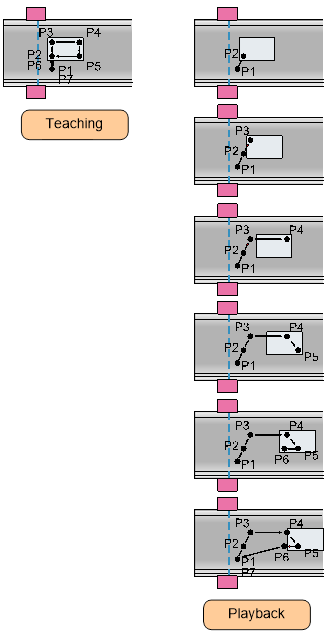
In order to playback the teaching trajectory P1~P7 (P2~P6 for conveyor synchronization) while the conveyor is stopped, as shown in the following figure, firstly, it is required to calculate the amount of the distance that a workpiece moved from the limit switch while being loaded and transported on a conveyor, and then add thus calculated value to the reference position. In order for this operation to take place, the robot needs to be synchronized with the change in the speed of a conveyor, and the relative position and pose between the workpiece and the tool need to be maintained.