3.2. Jog Operation of Servo Hand
3.2. Jog Operation of Servo Hand
To operate jogging of a servo hand in Teach pendant, set the additional axes mechanism in 『System』『5: Initialize』 → 『6: Mechanism Setting』 screen.

Figure 3.4 Mechanism setting
Press [Unit/Mechanism] of Teach pendant. The mechanism number and the axis number are indicated on top of the Teach pendant.
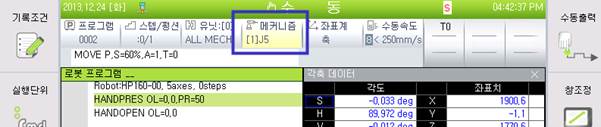
Figure 3.5 Mechanism (Servo hand axis) when available for jog operation
Press [X-] and [X+] keys according to the axis order to control the servo hand axis manually. As only the jog key is available for operating corresponding to the order of additional axes set in the mechanism, jog operation by robot is not available. The servo hand axis will have the same jog operation regardless of the system of coordinates. The maximum speed of jog operation at the additional axis is limited by 250mm/sec.