6.2. Virtual controller and controller files
6.2. Virtual controller and controller files
One virtual controller is connected to one robot in work space. When a robot comes in work space, first the virtual controller is initialized and then is set to the type of the robot without any additional axes.
You can use 10 robots at the most.
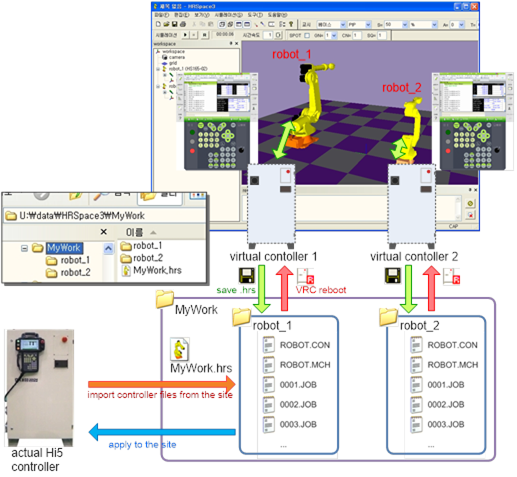
In an actual Hi5 controller, when job filesare created, they are saved as .JOB files and when system settings are done, they are saved as .CON, .MCH, or other various setting files. This is the same in a virtual controller. These text files are not included in .hrs document files and saved in separate folders.
n Warning: Save only one .hrs file in one folder!
Control files of each robot in project “.hrs” are saved in sub folders. If you save many .hrs files in one folder, be careful because other .hrs file’s controller files could be overwritten.
|
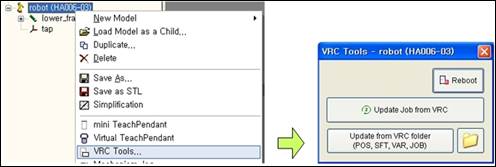
VRC Tools dialog box is open when you select VRC Tools from popup menu to the robot model.
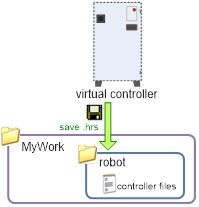
| Virtual controllers to all robot models import controller text files and are booted when you open .hrs document. |
| ||
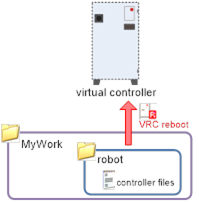
| Virtual controllers import all controller text files and are rebooted when you click [Reboot] button in VRC Tools dialog box. | |||
| It imports only all variable files and JOB files without rebooting when you click [Update from VRC folder] in VRC Tools Dialog box. | |||
| It only updates selected JOBs by using text files when you click [Update from folder] in VRC Tools Dialog box to JOB model. | |||
| All controller files to robot models are saved as text files when you save the whole .hrs documents. |
| ||
| Only selected JOBs are saved as text files when you select [Save to Folder] in popup menu to JOB model. | |||
| You can edit selected JOBs with NotePad when you select [Edit with NotePad...] in popup menu to JOB model. The changes are applied to virtual controllers when you run [Update from Folder] after editing. |
| ||
| You can open VRC folder with Explorer when you click [Folder] button in VRC Tools dialog box. |
| ||