4.6.2. Positioner master teaching and playback
4.6.2. Positioner master teaching and playback
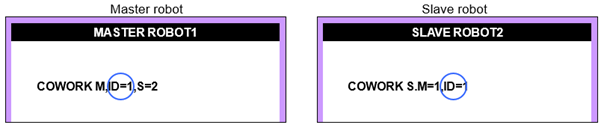
(1) You can teach the master and slave using the COWORK command. Set the ID=1 for the slave to select the master positioner to master.
(2) While the positioner is set as the master (Master robot side coordinate ‘Synchronize S1’), the position of the slave needs to be recorded. At this time, this position is recorded based on positioner end effecter coordinate.
(3) For the master side to collaborate with the positioner, teach SMOV step in the same way as the existing positioner. If the step is recorded for the slave when the master positioner is set to master (Master robot side coordinate ‘Synchronize S1’), the robot number reflecting the master ID is recorded.
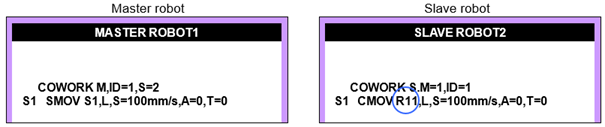
The master is the same as the positioner synchronization function. The slave is recorded in R11.
(4) Teach the master and slave in the above method in (3) and finalize with COWORK END.


(5) Check the operation in manual mode and operate in auto mode.
Caution
l In the jigless cooperation control, the positioner groups 1~2 are supported. You must select positioner group number 1 or 2 for positioner jog and CMOV.
l If the value set in COWORK S,M=#1, ID=#2 for slave is different from the CMOV R#1#2 value, an error is generated saying『E1365 CMOV master No. ID is inappropriate.』.