4.5. CMOV record position check
4.5. CMOV record position check
CMOV step is a useful function to check the teaching position during CMOV record mode using the step forward/backward function. Because CMOV step records position and position of master end effecter coordinate, the tool position of the master must be checked before executing.
(1) Set the master robot (COWORK M) to the master condition for manual cooperation. (R351,1)
(2) Set the slave robot (COWORK S) to CMOV record condition. (R351,3)
(3) Move and stop the master robot to the step position for cooperation.
(4) Select the CMOV step to move and press the step forward key to move the slave to the recording position on master end effecter. For example, if the CMOV recording position is at the zero point of master end effecter coordinate (0,0,0), the master CMOV step position will move the zero point of master end effecter coordinate irrelevant of whether the master robot is in the solid line or dotted line.
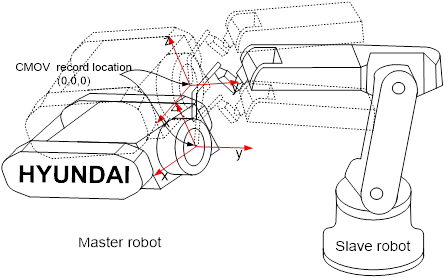
Figure 4.6 CMOV record position check
Caution
l In CMOV record condition (R351,3 condition), it moves to the applicable step position irrelevant of whether the COWORK command is executed or not.
l Master jog cannot be used in CMOV record condition.
l Because real time cooperation operation does not work in CMOV record condition, keep the master stopped and not operate it step forward/backward.
l After changing the master position of the CMOV record, stop the robot. If you move the CMOV step forward it will move the renewed position.