3.1. Cooperative control status monitor
3.1. Cooperative control status monitor
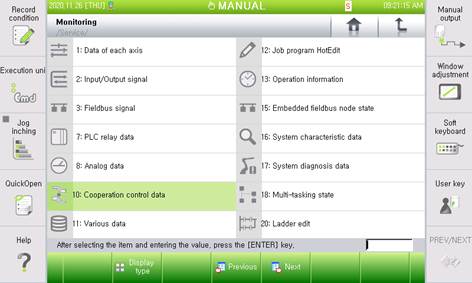
(1) Select “[F1]: Service” → “1: Monitoring” → “10: Cooperation control data.”
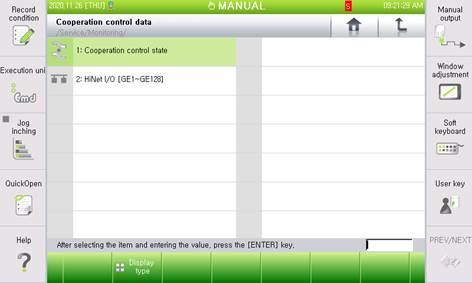
(2) Select “1: Cooperation control state.”
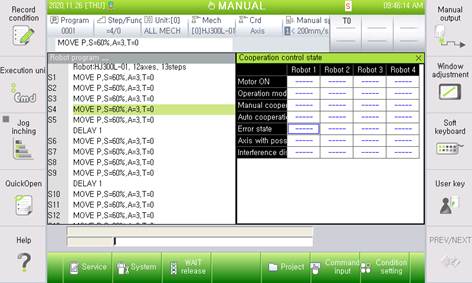
(3) The cooperative control status will appear as follows:
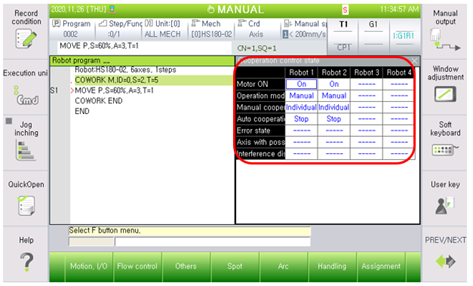
(4) The items of the monitoring function have the following meanings:
n Motor ON: This indicates the operating ready status of the robot (ON/OFF).
n Operating mode: This indicates whether the robot is set at the manual or automatic mode (Manual/Automatic).
n Manual cooperation: This indicates the cooperation status of the robot in the manual mode.
Individual: individual jog status
Master: cooperative jog status, assigned as the master
Slave: cooperative jog status, assigned as a slave
n Automatic cooperation: This indicates the cooperation status of the robot in playback.
Stopped: This indicates that the robot is not operating.
Independent: This indicates that the robot is performing an independent playback motion.
Standby: This indicates that the robot is waiting for the counterpart robot to reach the cooperation position under the cowork command.
Cooperation: This indicates that the robot is performing a cooperative playback.
n Error status: This displays the recent error status of the robot. The status will be cleared after startup.
n Axis subject to interference: This indicates the name of the robot axis that has the shortest distance to the counterpart robot.
n Interference distance [mm]: This indicates the distance between the axes subject to interference.

l In the cooperative control parameters, if the cooperative control is set at <disabled>, monitoring information will not appear.