6.5.1. Zero Setting
6.5.1. Zero Setting
(1) Put the controller into TEACH mode and select [MOTOR ON]. If you cannot select MOTOR On due to abnormality, set the origin position of the robot by using the brake release switch.
(2) Move respective axes to the basic posture, then set them by the scale mark.
(3) Reset the Encoder. Refer to 『6.5.2 Encoder Reset』for the method of encoder reset.
(4) Correct the encoder. Refer to 『Controller Operation Manual』.
(5) Confirm that there is no problem in robot motion.
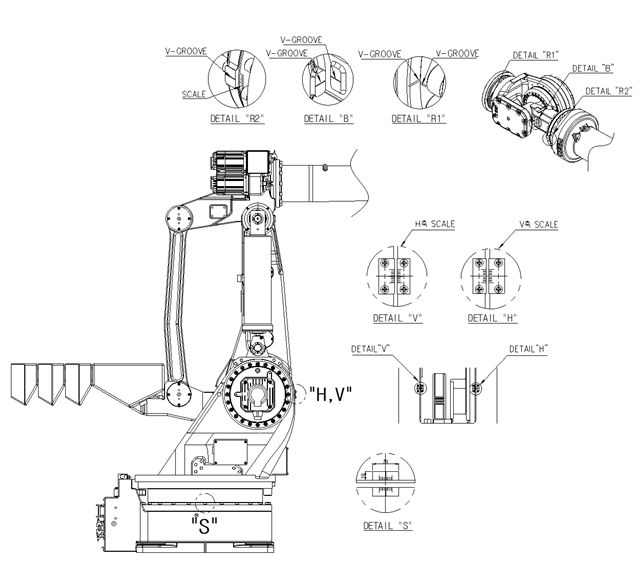
Figure 6.2 Method of Zero Setting