6.5.1. Setting the Origin
6.5.1. Setting the Origin
(1) Set the controller to the teaching mode and set the Operation Ready function to the [ON] state.
If it is impossible to set the Operation Ready function to the [ON] state, you should set the reference position of the robot by using the brake release switch.
(2) Move each axis into the default posture to match the line on the scale.
(3) Reset the encoder. For the encoder resetting method, refer to 『6.5.2 Resetting the Encoder.』
(4) Please calibrate the encoder. Refer to 『7.5.4 Resetting the Serial Encoder』 of the Controller Operation Manual.
(5) Check whether there is any problem with the operation of the robot.
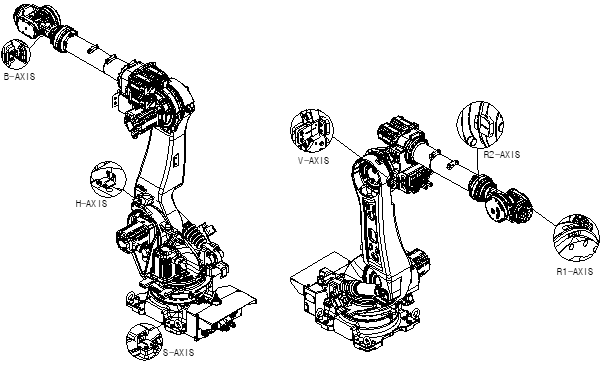
Figure 6.6 How to Reset the Origin