3.5.1. Permitted load torque estimation
3.5.1. Permitted load torque estimation
The load, which will be applied to the mechanical interface of robot's wrist axis, is restricted by allowable weight, allowable load torque and allowable moment of inertia.
 Allowable Maximum Pay Load Weight :
Allowable Maximum Pay Load Weight :
Table 3‑2 Allowable load weight
Robot Model | Allowable Load Weight |
HR050 | Less than 490.5 N (50kgf) |
HR030L | Less than 294.3 N (30kgf) |
 Allowable Load Torque
Allowable Load Torque
Table 3‑3 Allowable Load Torque
Robot Model | Allowable Load Torque | ||
R2 Axis Rotation | B Axis Rotation | R1 Axis Rotation | |
HR050 | Less than 176.5 N·m (18 kgf·m) | Less than 88.3 N·m (9 kgf·m) | |
HR030L | Less than 117.6 N·m (12 kgf·m) | Less than 58.8 N·m (6 kgf·m) | |
Allowable Moment of Inertia
Table 3‑4 Allowable Load Torque
Robot Model | Allowable Moment of Inertia | ||
R2 Axis Rotation | B Axis Rotation | R1 Axis Rotation | |
HR050 | 6.48kg·m2 (0.66kgf·m·s2) | 1.62kg·m2 (0.17kgf·m·s2) | |
HR030L | 4.80kg·m2 (0.49kgf·m·s2) | 1.20kg·m2 (0.12kgf·m·s2) | |
Loads must be kept below maximum conditions shown in [Table. 3-2 ~ 3-4].
[Fig 3.9 ~ Fig 3.10] show the possible range in which a point load can be positioned, assuming the attached load is a particle. However, as the actual load(End Effector) is not a particle, calculate and evaluate the moment of inertia on each axis. The following example shows moment of inertia calculation assuming the attached load is a particle.
[Example〕An attached load weight is 40Kg with the 【 HR050 】Model
n Allowable position of the center of gravity from the center of R1 axis
① Allowable position of the center of gravity from the center of Axis R1
LR1 ≤ (Allowable Torque) / (Load Weight)
LR1 = 88.3 N·m / (40Kg×9.8 m/s2) = 0.225 m
② Allowable position of the center of gravity from the allowable moment of inertia
LR1 ≤ (Allowable moment of inertia/ Load Weight)1/2
= (1.62 kg·m2 / 40 kg )1/2 = 0.201 m( < 0.225 m)
From the above result, the maximum distance from the center of R1 axis becomes 0.201 m, being restricted by the allowable moment of inertia.
n Allowable position of the center of gravity from the center of Axis B
(The center of B axis is on the same axis of this robot, and the value of the allowable load torque and allowable moment of inertia of B and R2 axes are the same. Therefore, if the allowable condition on the B axis is satisfied, it guarantees to satisfy that on the R2 axis..)
① Allowable position of the center of gravity from the allowable torque
LB ≤ (Allowable Torque) / (Load Weight)
LB = 176.5 N·m / (40Kg×9.8 m/s2) = 0.450 m
② Allowable position of the center of gravity from the allowable moment of inertia
LB ≤ (Allowable moment of inertia / Load Weight)1/2
= (6.48 kg·m2 / 40 kg )1/2 = 0.402 m( < 0.450 m)
From above result, the maximum distance from the center of B axis becomes 0.402 m, being restricted by the allowable moment of inertia.
n Torque Map
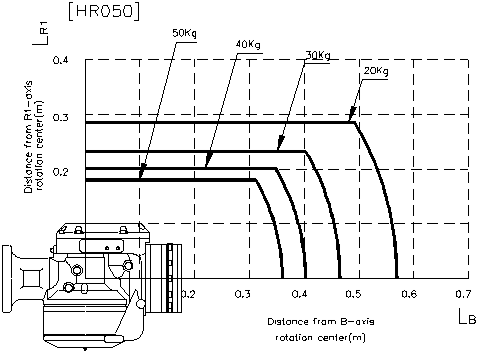
Figure 3.9 Wrist Axis Torque Mapping:[HR050]

Figure 3.10 Wrist Axis Torque Mapping:[HR030L]