3.5.1. Permitted load torque estimation
3.5.1. Permitted load torque estimation
The load, which will be applied to the mechanical interface of robot's wrist axis, is restricted by allowable weight, allowable load torque and allowable moment of inertia.
Refer to [Figure 3.6] so that load may not exceed the allowable conditions.
n Step 1 (Allowable weight)
To check whether weight is within the allowable weight on the design spec of robot
n Step 2 (Allowable load torque)
As unbalance torque does not exist on the wrist axis due to property of palletizing robot, allowable load torque is not considered in the calculation of load.
n Step 3 (Allowable moment of inertia)
Calculate the value of moment of inertia of load at the center of wrist axis (JR2).
Moment of inertia at the center of rotation of JR2- R2 axis
Check whether the value of moment of inertia is below limited value.
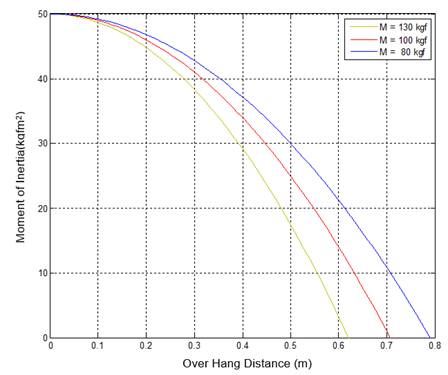
Figure3.6 Wrist axis load condition
 Allowable Moment of Inertia
Allowable Moment of Inertia
Table 3‑1 Load on the wrist axis
Robot Model | R2 Axis Rotation | ||
Allowable weight | Allowable load torque | Allowable moment of inertia | |
HP130 | 130 kgf | - | 50kgfm2 |