6.4.4. Replacing Axis-H, V Reducer [HA006E]
6.4.4. Replacing Axis-H, V Reducer [HA006E]
(1) Set the controller to teaching mode and set the robot to standby [ON] condition. If the robot is not in standby [ON] condition, check whether the arm is sufficiently fixated to avoid it from dropping. And then proceed to (4).
(2) The posture of the robot shall be as shown as below to prevent the arm from dropping.
For Axis-H: refer to [Figure 6.11]
For Axis-V: refer to [Figure 6.13]
(3) Turn the main power [OFF] with the controller power [OFF].
(4) Remove the motor wire and remove the bolt from the motor to remove the motor from the robot body.
(5) With reference to the following figure, remove the bolt from the outlet side of the reducer.
For Axis-H: refer to [Figure 6.12]
For Axis-V: refer to [Figure 6.14]
(6) Remove the part above the outlet side of the reducer slowly using a crane.
(7) With reference to the figure in (5), remove the O-ring (AS568-156 / S90).
(8) Upon removal of the bolt from the inlet side of the reducer, remove the reducer.
(9) Replace the O-ring (AS569-159 / S110) for the new reducer before assembling the reducer. Clean and deoil the bolt of the reducer and tighten it using a torque wrench to the specified torque. (Torque 15.6Nm / 8.8 Nm).
Bolts need to be tightened in a diagonal sequence.
(10) Replace the O-ring (AS568-156 / S90).
(11) Assemble the part above the adapter with the reducer slowly using a crane, which had been removed in Step (6). Clean and deoil the bolt of the reducer and tighten it using a torque wrench to the specified torque (Torque : 73.5 Nm / 72 Nm).
Bolts need to be tightened in a diagonal sequence.
(12) With reference to [6.4.2], assemble the motor and connect the motor wire.
(13) Fill up with the specified grease.
(14) Confirm that there is no error in robot's motion.
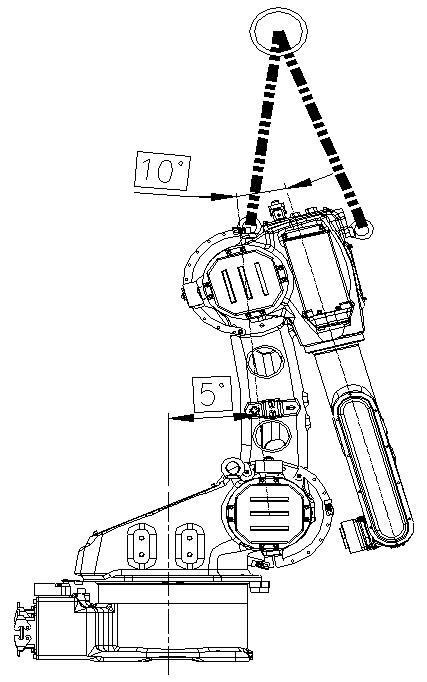
Figure 6.11 Robot position when replacing the H axis reducer [HA006E]

Figure 6.12 Axis-H Reducer Disassembly Diagram [HA006E]

Figure 6.13 Robot position when replacing the V axis reducer [HA006E]

Figure 6.14 Axis-V Reducer Disassembly Diagram [HA006E]