7.5.6. Mechanism setting
7.5.6. Mechanism setting
Mechanism is a component that forms the unit and is to be utilized as a group when the jog is operated.
When the setting of mechanism is carried out, the mechanism number (M#) will be assigned to each group of individual axes. This menu is to set the endless function as enable/disable, and set the positioner group.
(1) Select 『[F2]: System』 → 『5: Initialize』 → 『6: Mechanism setting』from the initial screen of MANUAL mode.
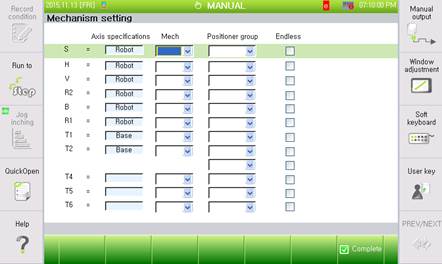
Figure 7.88 Mechanism setting
(2) Set the mechanism number, endless function Enable/Disable and positioner group number of each axis.
(3) The content of each item is as follows.
n Mechanism
- Set the mechanism number of the relevant axis.
- When the axis specification is a robot, this will be fixed as mechanism MO.
- Mechanism 1~7 can be assigned starting from the additional axis.
- Those axes set with the identical mechanism number will be managed as the same group.
- For the jog of the additional axis, the [Mechanism] key is used to shift between mechanism groups, and, if the jog is pressed at that time, the jog activity will take according to the sequence of the axes of the mechanism.
n Endless
- Set whether to use the endless function in the relevant axis in the enable/ disable state
n Positioner group
- Set the positioner group number of the positioner axis.
- You can only set the positioner group number to the axis set with the positioner.
(4) To save the set data, press the 『[F7]: Complete』key. When you press the [ESC] key, the changed data will not be saved.

l The combination of set mechanisms can be used by being assigned as a unit. For concept and content related to the unit, consult the following paragraph.
l How to designate the positioner group
① Designate the group in the order from the lowest axis.
② The asynchronous groups will be designated as “Disable”.
③ Because only 2 axes are supported for the same group of the positioner, you must not set 3 axes for one group.
④ As the previously specified calibration data of the positioner are invalidated when you redefine the group settings, you must reexecute the calibration of the positioner.
l Mechanism jog rules
① Hi5a controller provides a total of 8 jog keys.
② Mechanism is a group that will be used for the jog operation.
③ When the mechanism number is selected as [M0], the axis 7/8 jog keys will be operated as an exception. It is possible to operate M1 and M2 within the range of the 8 axes, including the following mechanisms. In this case, if the mechanism number is set as [M1], it will be possible to perform jog operation of the components of M1.
④ The examples of function usage are as shown below.
Ex1) M0: Robot (axis 1~6), M1: Traverse axis (axis 7), M2: Servo gun (axis 8)
Select [M0] à Axis 1~6 jog key: M0, Axis 7 jog key: M1, Axis 8 jog key: M2
Select [M1] à Axis 1 jog key: M1
Select [M2] à Axis 1 jog key: M2
Ex2) M0: Robot (axis 1~6), M1: Traverse axis (axis 7), M2: Servo gun (axis 8~9)
Select [M0] à Axis 1~6 jog key: M0. Axis 7 jog key: M1.
Select [M1] à Axis 1 jog key: M1
Select [M2] à Axis 1~2 jog key: M2
Ex3) M0: Robot (axis 1~7), M1: Traverse axis (axis 8), M2: Servo gun (axis 9~10)
Select [M0] à Axis 1~7 jog key: M0. Axis 8 jog key: M1
Select [M1] à Axis 1 jog key: M1
Select [M2] à Axis 1 jog key: M2