7.5.4. Serial encoder reset
7.5.4. Serial encoder reset
The serial encoder reset function is to release the error state of the motor or to newly set the zero-point of the encoder.
When an encoder reset is performed, the rotation frequency of encoder will be cleared to 0.
The internal memory of the serial encoder stores the rotational frequency information of the encoder. The encoder reset function needs to be carried out at the initialization work stage, while the function must not be used at all when the robot is operating normally.
However, when there are errors related to encoders, such as errors with encoder communication or encoder battery drainage, it is necessary to perform a reset. At this time, a difference from the previous robot origin position could have been caused. Thus, it is necessary to check and alter the actual position of the robot program.
The serial encoder reset can be performed by setting the encoder reset mode for each axis. If it is necessary to release the encoder-related errors without clearing the encoder rotation frequency, the encoder reset mode should be set to “Error release.”
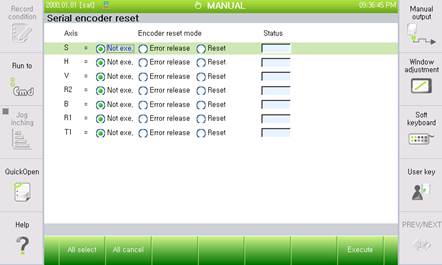
Figure 7.86 Serial encoder resetting

l In order for the serial encoder to memorize the location even when the power of the controller is out, there is a battery attached for the encoder. If both the power for the controller and the battery power for the encoder are not supplied at all, the location information of the encoder will be deleted, causing you to suffer some difficulties in using the work program.
l Accordingly, in case of encoder battery voltage error, the replacement of the encoder battery must take place only when the power of the controller is turned on.