7.3.8. Collision detection
7.3.8. Collision detection
When a collision occurs during robot operation, the collision detection function makes it possible to compare the torque normally generated during robot operation with the torque currently generated. If an abnormal torque is generated, process it as an error to minimize the damage from the collision.
In the Hi5a controller, the overcurrent, overload, overspeed, and location deviation error detection functions, which are the existing safety functions when a robot operates abnormally, are complementarily working with the collision detection function to help enhance robot safety.
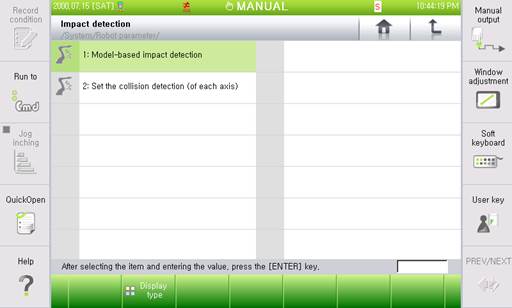
Figure 7.69 Collision detection menu screen