7.3.5. B axisdead zone
7.3.5. B axisdead zone
This sets the dead zone of the B axis.
Near the 0-degree area of the B axis, the center of the R1 axis rotation and the center of the R2 axis rotation are nearly in parallel. When the robot’s TCP performs a linear or circular interpolation, the wrist axis will move abruptly in short spurts.
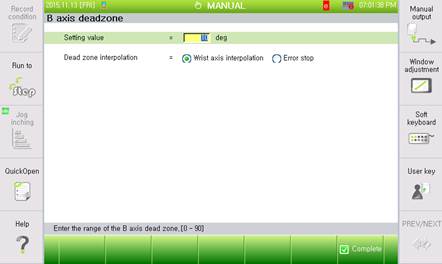
Figure 7.65 B axis dead zone setting screen
n Setting value: Enter the angle for B axis dead zone.
n Dead zone interpolation
When the robot trajectory needs to go through the B axis’ dead zone in the interpolation operation, this function provides the option of treating it as an error and stopping the robot.