7.3.9. Maintain current reduction
7.3.9. Maintain current reduction
This function reduces the gravitational load applied to the motor while the robot is stopped.
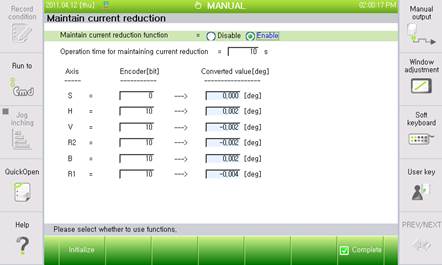
Figure 7.73 Holding current reduction setting screen
n Maintain current reduction: Option to either enable or disable the function
n Operating time for maintaining current reduction
Designates the time until the Maintain current reduction function is activated after the robot stops. If the time is set too short, the function will be activated frequently, making the cycle time longer.
n Encoder and Converted value
This is the allowable operation value of each axis for performing the Maintain current reduction function. If the encoder set value is high, the operating distance of the tool end will be increased. Thus, a proper encoder value needs to be set.

While the Maintain current reduction function is activated, if the start input is fed, operation will be completed before the robot starts. Because the Maintain current reduction function will be activated for about 1 second, this operation could cause some problems by performing synchronous motion with external systems. When this problem occurs, you must change the Maintain current reduction function to “Disable”.