1.2.4. Support for communication
1.2.4. Support for communication
Currently, the Pick-it equipment supports Ethernet TCP communication, and the Hi5a controller and the robot of Hyundai robotics support Ethernet UDP communication, respectively. Therefore, for the robot and Pick-it equipment to interoperate, separate communication equipment is needed to perform the conversion in the middle. In other words, it is necessary to have separate equipment that can convert TCP variable into UDP variable and vice versa between TCP and UDP communications supported by the robot and Pick-it equipment, respectively.
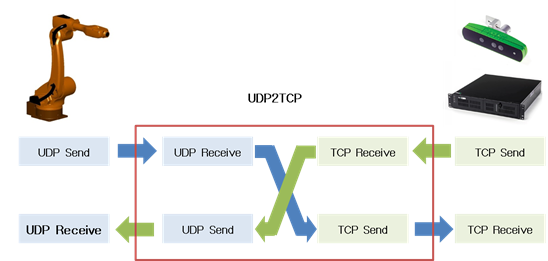
Figure 1-4 Communication conversion between the robot of Hyundai Robotics and Pick-it equipment
To solve the problem of using different communication protocols between the robot and Pick-it equipment, Hyundai Robotics provides UDP2TCP software and hardware to convert UDP variable into TCP variable. The relevant equipment will convert the communication protocols between Hyundai Robotics and Pick-it, making it possible to perform smooth communication between two different protocols used by the robot and Pick-it equipment.
The UDP2TCP converter provided by Hyundai Robotics is universal equipment, meaning that it is not dedicated to our robots and can be used for other communication equipment as well. However, as the UDP2TCP converter is mainly designed to support the communication between the robot and Pick-it equipment, it cannot be used when communication is performed at a frequency of 1 kHz or higher. If there is another universal communication equipment that can perform protocol conversion between UDP and TCP, it can be used without affecting the operation. Refer to Chapter 2 for details.