1.2.3. Common operation flow
1.2.3. Common operation flow
Figure 1-3 describes the roles and operation flow between the robot and Pick-it equipment. The flow of all operations between the robot and Pick-it equipment is basically the same as that shown in Figure 1-3. In the figure, the vertical lines between the robot and Pick-it equipment indicate the timeline, meaning that time passes from top to bottom. There are two vertical lines. The left one shows the time and operation of the robot, and the right one shows the time and operation of the Pick-it equipment. The horizontal lines between the two vertical lines indicate the command and variable to be exchanged between the robot and Pick-it equipment transferred in the direction indicated by the arrow.
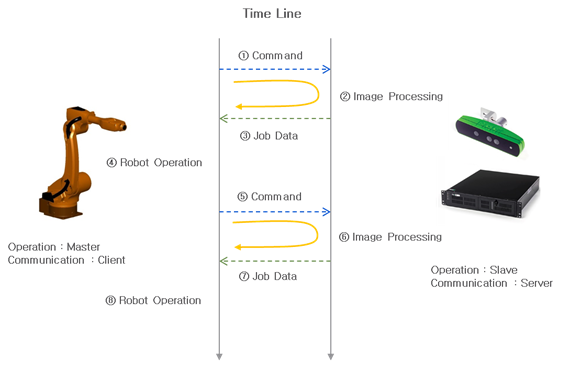
Figure 1-3 Flow of operations between the robot and Pick-equipment
The basic operation sequence between robot and pick-it equipment is as follows.
l When there is no work, both the robot and Pick-it equipment are all in waiting mode.
l When work is generated, the robot sends a command to the Pick-it equipment.
l The Pick-it equipment waits for a command from the robot, and when receiving a command, processes the relevant command.
l In between, the robot waits to receive the command processing result from the Pick-it equipment.
l When receiving the processing result from the Pick-it equipment, the robot performs the work starting from this moment.
l When the work is finished, the robot sends a command again to the Pick-it equipment and repeats the above process.
The robot and Pick-it equipment are interoperating according to the above process. The commands and variables to be exchanged will vary only according to the commands and works, while the flow is the same. Detailed descriptions of the actual process of sending a command and receiving variables are covered in Chapters 3 and 4.