8.1. Cooperation control condition monitor
8.1. Cooperation control condition monitor
(1) Select 『[F1]: Service』 → 『1: Monitoring』 → 『10: Cooperation control data 』
(2) Select 『1: Cooperation control status』.

(3) Cooperation control condition will be displayed as follows.
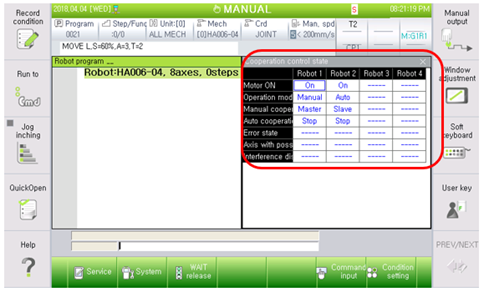
(4) Each condition of monitoring function has different meanings as follows.
n Motor ON: This shows whether each robot is ready for operation. (ON/OFF)
n Operation mode: This shows whether each robot is set to manual or auto mode. (Manual/Auto)
n Manual cooperation: This shows the cooperation condition of each robot in manual mode.
Individual: Individual jog condition
Master: Cooperation jog condition, designated as master
Slave: Cooperation jog condition, designated as slave
n Auto cooperation: This shows the cooperation condition during robot playback.
Stop : Robot is not in operation
Indiv. : Individual robot playback
Wait : Standby for collaborating robots to be in position for COWORK command
Cowork : Playback during cooperation
n Error: This shows the recent error condition of each robot and it is cleared when operation starts.
n Axis subject to interference: This means the axis of a robot that is closest to another cowork robot.
n Interference distance (mm): Distance between axes subject to interference

l If the cooperation control is set to <Disable> in cooperation control, the monitoring information will not be displayed.
