4.6. Reference point registration
4.6. Reference point registration
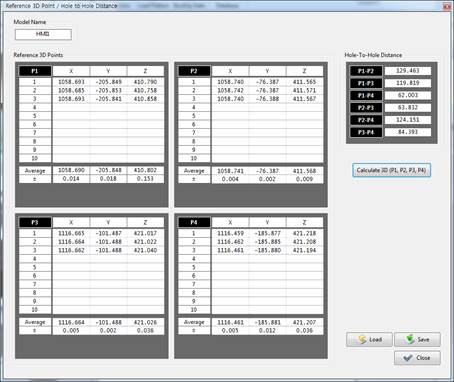
If the 3D position measurement for each stereo camera is completed, register the measured points as the reference points. Click “Settings → Reference Point” on the operating button.Select the car model in the “Car Model” panel, and press the “3D” button of the camera corresponding to individual robots. For example, in order to acquire the 3D position measured from the camera corresponding to robot L1, press the “3D (L1)” button. Each time the button is pressed, the measured 3D average position and accuracy will be calculated. It is recommended to perform measurement for 10 times for the accuracy of the reference car body position. Taking into consideration that the accuracy will be influenced by various factors, it is recommended to check the external illumination, camera aperture, cable, and registered patterns again if the ± value is large. Perform the process repetitively for the L2, R1, and R2 robots. Pressing the “Save” button will store it as the reference car body.