3.2.3. Hand-eye calibration
3.2.3. Hand-eye calibration
This is a process that acquires the relationship between the robot and the camera.
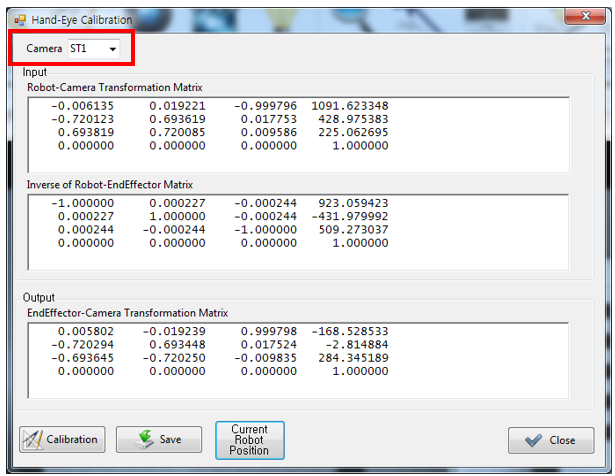
Selecting ST1 in the camera combo box will load and display the robot-camera transform matrix acquired in the previous stage. It is required to obtain in advance the input of the robot position resulted when acquiring the calibration plate.
Clicking the “Current Robot Position” button in the dialog box will display the inputted robot position data in the “Inverse of Robot End Effector Matrix.”
Clicking the “Calibration” button and the “Save” button will complete the hand-eye calibration.
The hand-eye calibration information will be saved in the “C:*HRVision 3D-Stereo*Data*
RobCalTransform” folder.