3.2.1. Stereo Camera Calibration
3.2.1. Stereo Camera Calibration
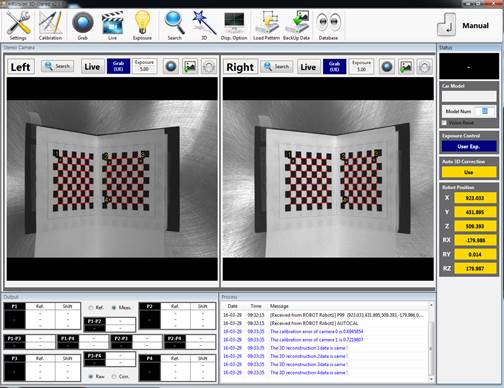
This is a process that performs camera calibration to match the camera coordinate system and the common coordinate system of the process. HRVision 3D-Stereo performs calibration by using the calibration plate, as shown below.

The abovementioned calibration plate needs to be arranged to be positioned inside the quadrangle of the camera.
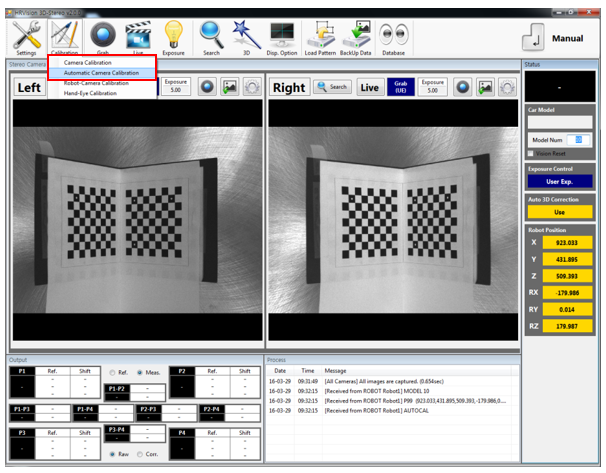
In the “Calibration” menu of the HRVision 3D-Stereo menu, click “Automatic Camera Calibration.” When there is a calibration plate arranged on the screen, the corner points inside the calibration plate will be detected automatically. Then, the projection matrix will be saved in the “C:*HRVision Stereo*Cal” folder. Check whether the “P1L.txt” and “P1R.txt” files relevant to the selected camera models are created. If the files are created, camera calibration will be completed. If not set automatically, move the robot to the point where the corner points of the calibration plate is clearly visible, and then execute again.