5.7. Select user coordinate
5.7. Select user coordinate
When manually operating the jog based on the user coordinate defined by the user, select the user coordinate number for Cartesian operation. At this time, the robot executes the orthogonal coordinate operation in X, Y and Z axis direction of set user coordinate. Also when using the monitoring function, the X, Y and Z coordinates of the tool end displayed in the screen is displayed in coordinates in user coordinate system.
Select 『[F7]: Condition setting』 → 『9: Select user coordinate』from the initial screen of manual or auto mode.

l If the user coordinate system number is set to “0”, the operation is canceled for the user coordinate and the orthogonal operation and monitoring is done in the robot coordinate.  is displayed on the top of the screen. When you select the axis data monitoring, the following screen will be displayed.
is displayed on the top of the screen. When you select the axis data monitoring, the following screen will be displayed.

l Number besides 0 displayed on the edit box is displayed as the number off the coordinate system registered as user coordinate system in the registration process of 『[F2]: System』 → 『2: Control parameter』 → 『7: Coordinate registration』 → 『1: User coordinate』.
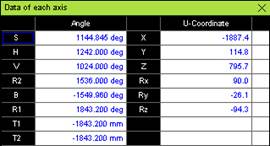
l When you select the user coordinate system number,  is displayed on the top of the screen. When you select 『[F1]: Service』 → 『1: Monitoring』 → 『1: Data of each axis』, the following screen will be displayed. At this time, the changed coordinate value by [Axis operation] key changes to the value based on the user coordinate system.
is displayed on the top of the screen. When you select 『[F1]: Service』 → 『1: Monitoring』 → 『1: Data of each axis』, the following screen will be displayed. At this time, the changed coordinate value by [Axis operation] key changes to the value based on the user coordinate system.
l For the user coordinate registration, refer to the 『[F2]: System』 → 『2: Control parameter』 → 『7: Coordinate registration』 → 『1: User coordinate』