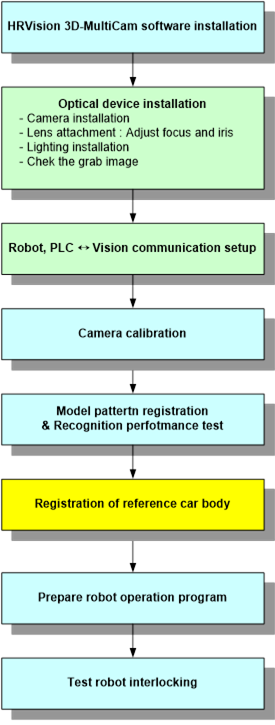
4. Work Procedure
The work procedure of the “HRVision 3D-MultiCam” is as follows.
The detail description of each procedure is provided in the following sections.
4.1. HRVision3D-MultiCam Software Installation
4.2. Optical Device Installation
4.3. Communication Setup of Robot and Vision
4.5. Model Pattern Addition and Pattern Recognition Test
4.6. Registration of Reference point
4.7. Creation of Work Coordinate System & Teaching/Conversion of Working Point