1.2. System Configuration
1.2. System Configuration
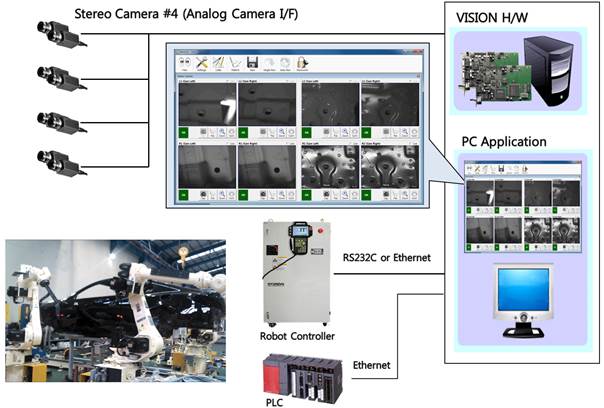
The figure below is a brief diagram of the vision system for applying under-body sealant using “HRVision 3D-MultiCam.” The system consists of robot and vision systems: The vision system consists of hardware, such as PC, frame grabber, camera, lighting, and PLC, and “HRVision 3D-MultiCam” software.
With “HRVision 3D-MultiCam” program, a user can configure and operate the vision system while the data is communicated using the PLC communication and Hyundai controller-dedicated communication protocol. Hyundai robot applies the sealant according to the location recognition of the vision system.
If a digital camera is used, the frame grabber is unnecessary.