2.2. Servo Hand Standard Position Setting
2.2. Servo Hand Standard Position Setting
(1) After confirming the normal operation of the servo hand, set the standard position of the servo hand axis.
(2) In Manual mode, select 『[F2]: System』 → 『3: Robot parameter』 → 『2: Axis constant to run』.
(3) To set a standard position, squeeze the moving hand (right) to the stopper of the fixing hand (left) along the direction of a force, and then record the axis data.
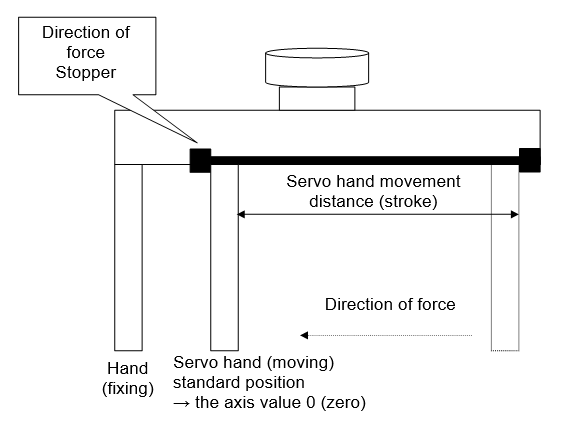
Figure 2.7 Servo Hand Standard Position Setting