5.4. Playback positioner independent operation
5.4. Playback positioner independent operation
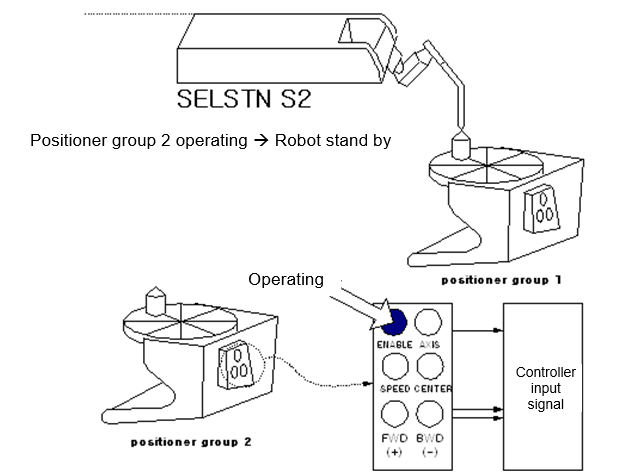
When independent operations are in progress as shown in the following picture, the applicable axis cannot be selected using SELSTN and operated by JOB program when independent operation of the positioner is already in progress.
When in playback, the independent operation of the positioner must be completed to proceed to the next step to change the station by SELSTN S# and SELSTN ALL command. Refer to the following program example.
SELSTN S1,5.0,S12 → Proceed after completing independent operation of station 1 (Standby 5 seconds)
S1 MOVE L,S=300mm/s,A=0,T=0
S2 SMOV S1,L,S=100mm/s,A=0,T=0
S3 SMOV S1,L,S=100mm/s,A=0,T=0
S4 MOVE L,S=300mm/s,A=0,T=0
S5 SMOV S1,L,S=100mm/s,A=0,T=0
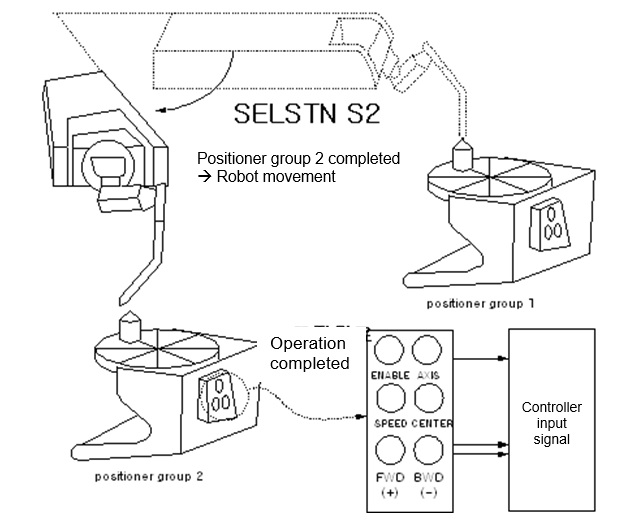
SELSTN S2,10.0,S12 → Proceed after completing independent operation of station 2
S6 MOVE L,S=300mm/s,A=0,T=0
S7 SMOV S1,L,S=100mm/s,A=0,T=0
S8 MOVE L,S=300mm/s,A=0,T=0
S9 SMOV S1,L,S=100mm/s,A=0,T=0
SELSTN ALL → Proceed after completing independent operation of station 3
S10 MOVE P,S=100%,A=0,T=0
S11 MOVE L,S=1200mm/s,A=0,T=0
S12 MOVE L,S=200mm/s,A=0,T=0
◆【Caution】◆
When the <Permitted> signal of the selected positioner is being entered, the robot will stand by in SELSTN location. When the independent operation of the selected positioner is completed, the robot will then move.
◆【Caution】◆
① When operating the program, the robot waits until the independent operation signal becomes <Prohibited> according to the position group selection condition. This action is for the safety of the user. This considers that when the independent operation signal is at <Permitted> that there is a worker.
② Because the change in step, change in program and external reset cancels the station selection (SELSTN ALL), the robot waits until the independent operation signals of all positioners have switched to <Prohibited> when reset.
③ When executing the following function, the positioner independent operation is disabled.
- Auto reset function of endless step, executing endless reset
- During collaborative control
- During gun change