4.3. Playback of PU Step
4.3. Playback of PU Step
This is applied to the step picking and lifting an workpiece. After picking up an workpiece, compare the height of avoidance step to the height of layer and then make it possible to control shift amount of avoidance step. When the step condition PU is used, the unnecessary travelling path of the robot can be minimized.
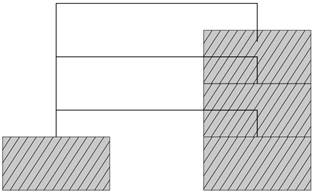
Figure 4.3 The rule of PU shifting the step picking and lifting an workpiece according to the layer height.

l If there is Palletize Shift (PAL) command language only, step option of PU, PS, and PK is applied.